Foram encontradas 50 questões.
- UniãoExecutivoDecreto 1.171/1994: Código de Ética do Servidor Público Civil do Poder Executivo Federal
Considerando o Decreto nº 1.171/1994, que aprova o Código de Ética Profissional
do Servidor Público Civil do Poder Executivo Federal, assinale a alternativa que NÃO apresenta uma
espécie de vedação ao servidor público.
Provas
Questão presente nas seguintes provas
Usualmente utilizado para sistemas lineares invariantes no tempo e controláveis em sua representação por espaço de estados ẋ(t) = Ax(t) + Bu(t), o regulador linear quadrático (do inglês, Linear Quadratic Regulator) é um controlador ótimo, com base na realimentação de estados, cujos ganhos são obtidos a partir da minimização de uma função custo quadrática do tipo:
J = (xT Qx + uT Ru)dt
(xT Qx + uT Ru)dt
Onde Q é uma matriz real simétrica positiva semidefinida e R é uma matriz real simétrica positiva definida. Para uma realimentação de estados do tipo u = −Kx, a minimização da função custo quadrática acima com J = x(0)TPx(0) é obtida com P > 0, sendo a solução da equação algébrica de Ricatti: ATP + PA − PBR−1BTP + Q = 0. Assinale a alternativa que apresenta a expressão final dos ganhos do controlador, dado que a solução P foi previamente obtida para o caso descrito acima.
J =
Onde Q é uma matriz real simétrica positiva semidefinida e R é uma matriz real simétrica positiva definida. Para uma realimentação de estados do tipo u = −Kx, a minimização da função custo quadrática acima com J = x(0)TPx(0) é obtida com P > 0, sendo a solução da equação algébrica de Ricatti: ATP + PA − PBR−1BTP + Q = 0. Assinale a alternativa que apresenta a expressão final dos ganhos do controlador, dado que a solução P foi previamente obtida para o caso descrito acima.
Provas
Questão presente nas seguintes provas
Assinale a alternativa que corresponde à estratégia de controle multivariável para o
sistema MIMO com duas entradas e duas saídas mostrada na Figura 12 abaixo: 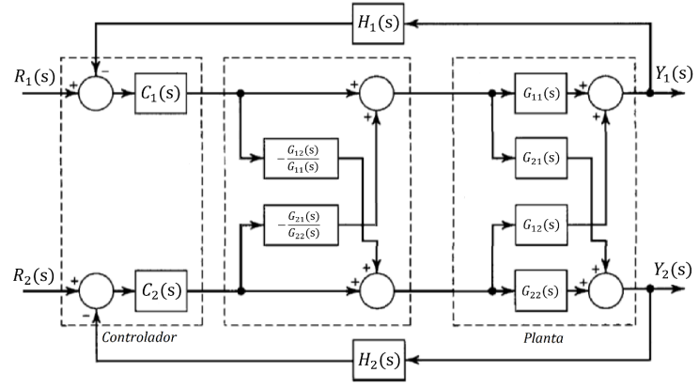
Figura 12
Figura 12
Provas
Questão presente nas seguintes provas
Considere o seguinte modelo em espaço de estados de um sistema linear representado na sua forma matricial:
 x ∈ Rn, u ∈ Rm, y ∈ Rp
x ∈ Rn, u ∈ Rm, y ∈ Rp
Sendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
x ∈ Rn, u ∈ Rm, y ∈ RpSendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
Provas
Questão presente nas seguintes provas
Assinale a alternativa que corresponde às matrizes associadas à representação em
espaços de estados do sistema mostrado na Figura 11 abaixo: 
Figura 11
Figura 11
Provas
Questão presente nas seguintes provas
Considere um sistema linear caracterizado pela seguinte função de transferência:
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Provas
Questão presente nas seguintes provas
Considere o sistema massa-mola-amortecido (Figura 10) a seguir:
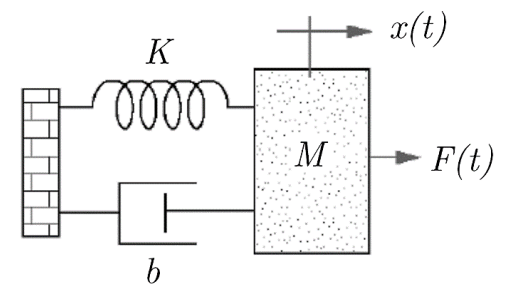
Figura 10
Os sinais de entrada e de saída do sistema são dados por F(t) e x(t), respectivamente. Além disso, definem-se as variáveis de estado como x1(t) = x(t) e x2(t) = ẋ(t). Com base nessas informações, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Provas
Questão presente nas seguintes provas
Sobre projeto de controladores discretos direto e por emulação, analise as assertivas
abaixo e assinale a alternativa correta.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
Provas
Questão presente nas seguintes provas
Considere um sistema linear invariante no tempo controlável, cuja representação em
Espaço de Estados é dada por: 
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
Provas
Questão presente nas seguintes provas
Considere o sistema abaixo (Figura 8) com retroalimentação unitária:
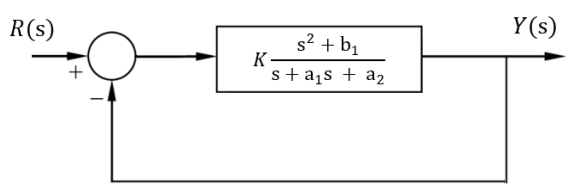
Figura 8
Dado o seu lugar das raízes mostrado na Figura 9 abaixo, assinale a alternativa correta.

Figura 9
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container