Foram encontradas 829 questões.
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: BR Distribuidora
Em condições ideais, um compensador do tipo PID em ação Proporcional-Integral-Derivativa permite introduzir, no ramo direto de um sistema de controle,
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: BR Distribuidora
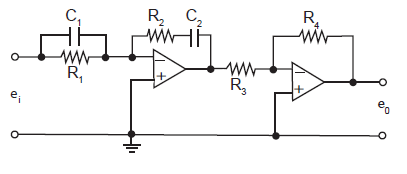
O circuito analógico da Figura acima corresponde a um
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: BR Distribuidora
Quando a malha aberta de um sistema de controle é oscilatória, recomenda-se verificar o comportamento da malha fechada empregando inicialmente um controlador do tipo
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: BR Distribuidora
O método do Lugar Geométrico das Raízes NÃO pode ser empregado na
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: BR Distribuidora
Considere abaixo o diagrama de blocos do sistema em malha fechada.
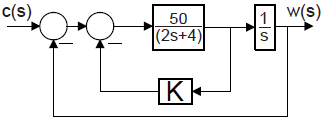
Qual o ganho K necessário para deixar o sistema em malha fechada com constante de amortecimento de 50%?
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: BR Distribuidora
Considere o modelo de um sistema linear contínuo e em malha fechada, representado pelo diagrama em blocos da Figura abaixo.

Se na entrada R deste sistema foi aplicado o sinal do tipo Rampa Unitária, o sinal da saída, Y, em regime permanente, tende para
Provas
Provas
Provas

Provas
Provas
Caderno Container