Foram encontradas 829 questões.
Em uma indústria petroquímica, um tanque
de reação química é controlado por um sistema
PID. O controlador é responsável por manter o nível do líquido do tanque dentro de certos limites
pré-definidos. Um operador observou que, apesar
do nível do líquido se estabilizar corretamente no
ponto desejado, há uma oscilação persistente em
torno desse ponto.
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Provas
Questão presente nas seguintes provas
Em um sistema de logística, um robô é utilizado para direcionar pacotes para diferentes destinos com base em um código de barras presente em
cada pacote. O robô funciona com uma máquina
de estados com quatro estados: S0, S1, S2 e S3,
que representam diferentes destinos. A lógica da
máquina de estados é:
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
Provas
Questão presente nas seguintes provas
Assinale a alternativa correta em relação às redes
industriais e suas características.
Provas
Questão presente nas seguintes provas
Qual é a função de um atuador em um robô?
Provas
Questão presente nas seguintes provas
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Provas
Questão presente nas seguintes provas
Considere o diagrama de blocos da figura a seguir.
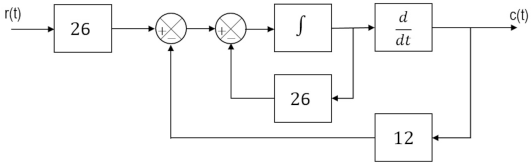
A função de transferência \( \dfrac{C(s)}{R(s)} \) do sistema representado por esse diagrama é dada por:
Provas
Questão presente nas seguintes provas
Considere o sistema mecânico da figura ao lado. O deslocamento vertical y da massa m é a saída do sistema. Esse deslocamento é medido a partir da posição de equilíbrio do sistema, ou seja, kδ = mg, em que δ é a deflexão estática da mola (quando a massa é pendurada na mola), k é a constante de elasticidade da mola, e g é a aceleração da gravidade. O sistema encontra-se em repouso para t < 0. Em t = 0, uma força externa f é aplicada ao sistema.
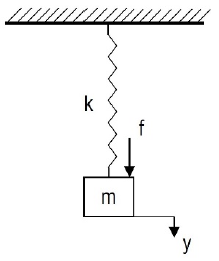
Assinale a alternativa que contém a função de transferência do sistema.
Provas
Questão presente nas seguintes provas
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Provas
Questão presente nas seguintes provas
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Provas
Questão presente nas seguintes provas
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
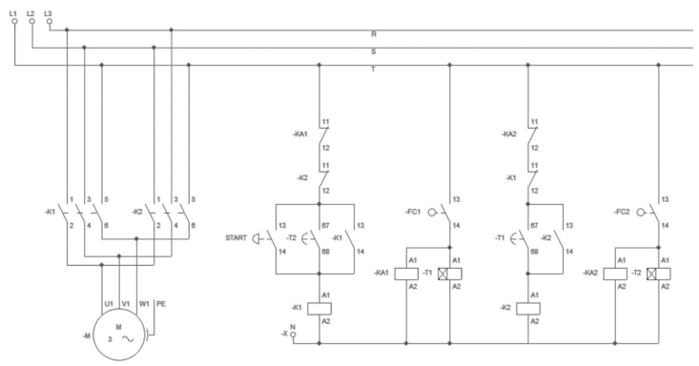
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container