Foram encontradas 829 questões.
Em um sistema supervisório, é possível monitorar e controlar uma planta industrial, permitindo ações proativas a
fim de melhorar a produtividade da planta.
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório:
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório:
Provas
Questão presente nas seguintes provas
A International Organization for Standardization (ISO), na
norma técnica ISO 8373, define robô como:
um manipulador multifuncional, controlado automaticamente, reprogramável, com três ou mais eixos, que pode estar fixo em determinado local ou ser móvel, utilizado em aplicações industriais.
Dentre os robôs industriais, os robôs articulados têm destaque. Eles podem ter vários eixos, todos rotativos. Para que o controlador do robô possa determinar as necessidades de posicionamento de cada braço ou elo, cada eixo possui um sensor que fornece informações para o controlador.
Dos sensores abaixo, qual é o utilizado nos robôs articulados?
um manipulador multifuncional, controlado automaticamente, reprogramável, com três ou mais eixos, que pode estar fixo em determinado local ou ser móvel, utilizado em aplicações industriais.
Dentre os robôs industriais, os robôs articulados têm destaque. Eles podem ter vários eixos, todos rotativos. Para que o controlador do robô possa determinar as necessidades de posicionamento de cada braço ou elo, cada eixo possui um sensor que fornece informações para o controlador.
Dos sensores abaixo, qual é o utilizado nos robôs articulados?
Provas
Questão presente nas seguintes provas
As válvulas pneumáticas proporcionais são utilizadas no
comando de precisão e reguladas por sinais analógicos
proporcionais. Esse tipo de válvula é utilizado para controle de pressão e vazão.
Das situações abaixo, qual NÃO é adequada à utilização de válvula proporcional em operações de controle?
Das situações abaixo, qual NÃO é adequada à utilização de válvula proporcional em operações de controle?
Provas
Questão presente nas seguintes provas
Um sistema automatizado é composto por três elementos: 1 - Sistema de Energia; 2 - Programa de Instruções;
e 3 - Sistema de Controle.
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Provas
Questão presente nas seguintes provas
Pode-se definir Sistema de Manufatura como uma coleção de equipamentos e recursos humanos integrados,
com a função de realizar tarefas e operações de processamentos de fabricação e montagem.
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Provas
Questão presente nas seguintes provas
O dispositivo que recebe na entrada uma grandeza física
e emite uma saída, que pode ser a mesma grandeza física ou não, é o
Provas
Questão presente nas seguintes provas
Nas entradas e na saída de um Controlador Lógico Programável (CLP) estão conectados os seguintes componentes:
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
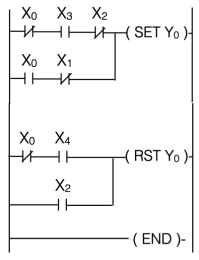
Analisando-se o programa, constata-se que o sistema em
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
Analisando-se o programa, constata-se que o sistema em
Provas
Questão presente nas seguintes provas
Os esquemas pneumático e elétrico de controle de um determinado dispositivo eletropneumático são mostrados abaixo.
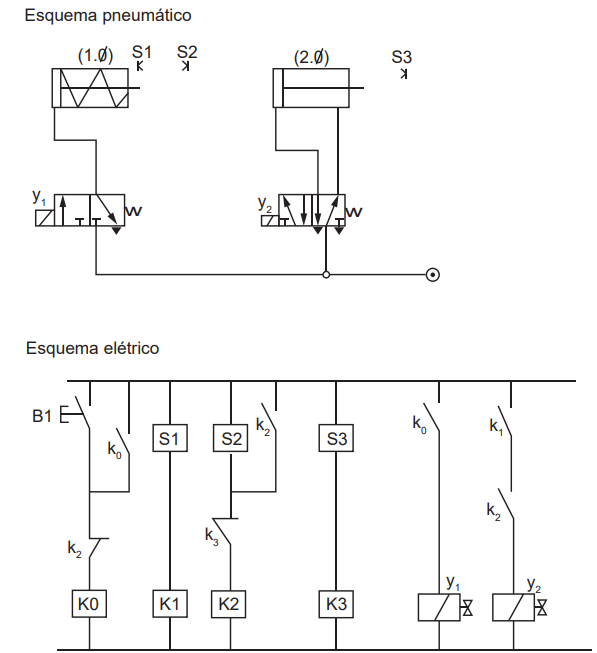
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Provas
Questão presente nas seguintes provas
- Robótica e Automação
- Automação Industrial para Engenharia de Automação
- Análise e Controle de Sistemas
Dentro da indústria de manufatura, a programação offline (OLP) tem se tornado uma prática
comum na programação de robôs. Com relação à
OLP, qual das seguintes afirmações é verdadeira?
Provas
Questão presente nas seguintes provas
Em uma fábrica de eletrônicos, um robô industrial é utilizado para a montagem de placas de
circuito. A velocidade e a precisão do robô são essenciais para garantir a qualidade do produto e otimizar a produção. Nesse contexto, o acionamento
por servomecanismo é fundamental.
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container