Foram encontradas 40 questões.
- Modelo OSIModelo OSI: Camada de Rede
- Modelo OSIModelo OSI: Camada de Transporte
- Modelo OSIModelo OSI: Camada de Sessão
- Modelo OSIModelo OSI: Camada de Apresentação
- Modelo OSIModelo OSI: Camada de Aplicação
A figura a seguir apresenta o modelo de referência OSI da ISO que serviu de base para projetos de padronização como MAP; TOP; MAP-EPA; TCP/IP (Ethernet); FieldBus. Associe o número da arquitetura de camadas da figura abaixo com o respectivo projeto/modelo.
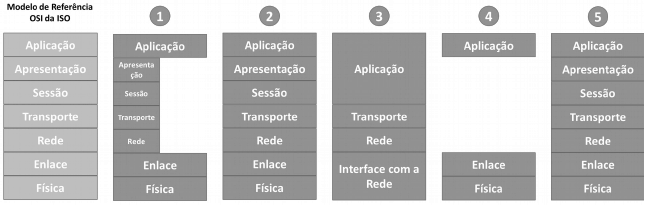
Assinale a alternativa que contém a ordem CORRETA de associação, de 1 até 5.
Provas
Os sistemas de controle e automação industriais atuais contemplam uma variedade de paradigmas, metodologias e tecnologias de computação, comunicação e controle, em que os fornecedores buscam garantir a interoperabilidade entre os equipamentos da rede.
Nessa perspectiva, leia com atenção as afirmações a seguir e marque (V) para as verdadeiras e (F) para as falsas.
( ) A norma denominada IEC61158 adotou 8 diferentes tipos de Fieldbus após 15 anos de discussões entre os principais players mundiais. Os tipos adotados foram: Fieldbus Foundation; ControlNet; Profibus; P-Net; Fieldbus Foundation High Speed Ethernet; SwiftNet; WorldFip; Interbus.
( ) Após anos de busca por uma padronização, é possível afirmar que a norma IEC61784 instituiu um conjunto de tipos de redes que abrangem todas as aplicações na indústria.
( ) A norma IEC61784 define um conjunto de profiles de comunicação específicos, baseados principalmente na norma IEC61158. Esses profiles são utilizados na concepção dos dispositivos de comunicação no ambiente industria
( ) O ambiente industrial possui características e necessidades que tornam redes para automação de escritórios mal adaptadas, a saber: o ambiente é hostil para operação dos equipamentos; a troca de informações ocorre predominantemente entre equipamentos e, às vezes, entre um operador e o equipamento, os tempos de resposta são críticos; a segurança dos dados é crítica; é grande a quantidade de equipamentos conectados na rede o que implica um custo de interconexão elevado;
( ) Na concepção de projetos de redes industriais, requisitos e características a serem considerados são: (a) Comportamento temporal; (b) Confiabilidade; (c) Requisitos do meio ambiente; (d) Tipo de mensagens e volume de informações; (e) Conectividade/interoperabilidade (padronização).
Assinale a alternativa que contém a sequência CORRETA, de cima para baixo.
Provas
Um determinado servossistema precisa ser controlado. Analisando o comportamento do servossistema, observa-se que este pode ser modelado pela equação diferencial ordinária (EDO):
!$ { \large d^2 u(t) \over dt^2} + 3 { \large du(t) \over dt} + 5u(t) = { \large d^3 v(t) \over dt^3} +15 { \large d^2 v(t) \over dt^2} + 7 { \large dv(t) \over dt} + 18 v(t) !$
Considerando como variável controlada o sinal de saída v(t) e como variável manipulada o sinal de entrada u(t), assinale abaixo a alternativa que corresponde CORRETAMENTE à função de transferência G(s) = V(s)/U(s) para esse servossistema que pode ser obtida pela transformada de Laplace da EDO.
Provas
Para identificar o modelo de um processo real de uma indústria, aplicou-se o teste de reação a um sinal de entrada do tipo degrau. Foi aplicado na entrada um degrau de 10V e obtida a curva de resposta da saída no tempo, através de um osciloscópio, dada pela figura a seguir.

Analisando a curva da resposta, pode-se obter a função de transferência de malha aberta através do método Ziegler-Nichols. Com base nessas informações, assinale a alternativa CORRETA.
Provas
Considere um sistema de controle digital, em que o processo contínuo em malha aberta P(s) é discretizado, usando um ZOH – zero order hold, ou seja, um segurador de ordem zero, com tempo de amostragem de 0.5 segundo. Ao se aplicar um controlador PID digital, ajustam-se os três ganhos de controle Kp, Ki, Kd, obtendo duas diferentes respostas no sistema controlado conforme as figuras I e II.

Onde:
!$ PID(z) = Kp +Ki.(1 -z^{-1})^{-1} + Kd. (1 - z^{-1})\,\,P(s) = 1/(s^2 + 2s +1) !$
Curva de Resposta I:

Curva de Resposta II:

Considerando as respostas obtidas pelos dois ajustes de controlador PID digital, assinale as sentenças verdadeiras com (V) e as falsas com (F).
( ) Para obter a resposta II a partir da resposta I, uma possibilidade é pela redução do ganho integral Ki do controlador PID, diminuindo a oscilação do sistema.
( ) Para obter a resposta II a partir da resposta I, aumentou-se o ganho integral Ki do controlador PID, reduzindo a oscilação do sistema e garantindo erro nulo em regime.
( ) Em ambas as respostas, o ganho integral Ki no PID digital é zero, pois o processo P(s) possui erro de regime permanente nulo em malha aberta.
( ) Na resposta II, o sistema ficou mais lento, podendo o ajuste ter sido feito pelo aumento do ganho derivativo Kd, o que resultaria na diminuição de oscilações quando comparado ao ajuste da resposta I.
( ) Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, pode-se afirmar que o sistema de controle ajustado para a resposta I é aproximadamente duas vezes mais rápido que o ajuste do controle da resposta II.
Assinale a alternativa que apresenta a sequência CORRETA de cima para baixo.
Provas
Para o dado manipulador planar com cadeia cinemática PR.

Assinale a alternativa que representa a CORRETA cinemática diferencial, em termos da matriz jacobiana inversa desse manipulador.
Provas
Dado o diagrama de blocos:

Assinale a alternativa com a função de transferência que representa Y(s)/R(s).
Provas
Considere um processo em malha aberta, dado pela função de transferência:
!$ { \Large {G(S) =}} { \Large { 1 \over S (2s + 18)}} !$
Para esse processo, realimenta-se uma malha de controle, usando um controlador proporcional de ganho Kp, conforme representado no diagrama de blocos a seguir:

A respeito do erro em regime permanente (Ereg) do sistema em malha fechada, assinale a alternativa CORRETA.
Provas
Considerando a cadeia cinemática do manipulador planar RR:

Qual o conjunto de equações, referente às coordenadas do ponto central da garra P(px,py) em relação ao sistema de referência cartesiano 0xy que representa a CORRETA cinemática direta de posição deste manipulador?
Assinale a alternativa que responde CORRETAMENTE à questão acima.
Provas
Assinale a alternativa CORRETA com relação ao cálculo de trajetórias em Sistemas CAM.
Provas
Caderno Container