Foram encontradas 20.975 questões.
O regulador linear quadrático LQR, é utilizado para controlar sistemas descritos em espaço de estados, de forma a minimizar a função custo: !$ J= \int_{0}^{∞} (x^T Qx+ u^T Ru)dt !$, , onde Q é um fator de ponderação de estados e R o fator de ponderação do sinal de controle. O objetivo é determinar uma matriz P que satisfaça a Equação Algébrica de Riccati de forma a obter a matriz de realimentação ótima de estados K, dada por !$ K=R^{-1}B^TP !$.
Assinale a alternativa que indica CORRETAMENTE a descrição do sistema em espaço de estados em malha fechada, após a aplicação da matriz de realimentação de estados.
Provas
Assinale a alternativa que indica CORRETAMENTE a função de transferência relativa ao sistema descrito abaixo em espaço de estados:
!$ \begin{matrix} \dot{x}_1 & -1 & 0 & 0 & x_1 & 1 \\ [\dot{x}_2] =& [0&-2&0].& [x_2]+&[1]. \mu \\ \dot{x}_3 & 0 &0 &-3& x_3 &1 \end{matrix} !$
!$ \begin{matrix} & x_1 \\y=[2-43] . & [x_2] \\ & x_3 \end{matrix} !$
Provas
O Light Dependent Resistor (LDR) ou fotoresistor é um sensor de luminosidade utilizado em uma infinidade de aplicações. Quanto ao funcionamento desse sensor, avalie o acerto das afirmações adiante e marque com V as verdadeiras e com F as falsas.
( ) Conforme aumenta a incidência luminosa no sensor, ocorre uma diminuição do valor de resistência nos seus terminais.
( ) Conforme diminui a incidência luminosa no sensor, ocorre uma diminuição do valor de resistência nos seus terminais.
( ) Conforme há a presença de incidência luminosa no sensor, aumenta o número de elétrons para a banda de condução, reduzindo a barreira de potencial pelo aumento do número de elétrons.
( ) Conforme há a presença de incidência luminosa no sensor, diminui o número de elétrons para a banda de condução, reduzindo a barreira de potencial pela diminuição do número de elétrons.
( ) Somente com a presença de incidência luminosa este sensor apresenta características resistivas em seus terminais.
Marque a opção que contenha a sequência CORRETA, de cima para baixo:
Provas
Com relação aos conversores estáticos de potência, marque (V) para as afirmativas verdadeiras e (F), para as falsas.
( ) A topologia buck - abaixador - têm sua tensão de saída inversamente proporcional ao tempo que a chave permanece desligada.
( ) O conversor tipo boost - elevador - têm seu ganho estático fortemente influenciado pela carga quando operado no modo de condução descontínua.
( ) Tempo morto é um termo utilizado para designar o intervalo de tempo entre comutações com o objetivo de se evitar curto-circuito.
( ) O conversor buck-boost- abaixador-elevador - possuí dois estágios de operação no modo de condução contínua: armazenamento de energia no capacitor acumulador e transferência de energia para o indutor de saída.
( ) A relação entre o tempo que a chave de potência permanece fechada e o período de comutação é conhecida como razão cíclica.
Assinale a alternativa que contém a sequência CORRETA de associação, de cima para baixo.
Provas
O método de identificação de sistemas discretos conhecido como Mínimos Quadrados Recursivos (MQR) é utilizado para estimar os parâmetros do modelo de planta. O diagrama abaixo representa o processo de estimação de parâmetros via MQR.
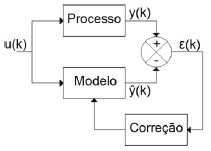
Neste diagrama, !$ u(k) !$ representa o sinal de controle discreto, !$ y(k) !$ a saída da planta, !$ \hat{y}(k) !$ a saída estimada, dada por !$ \hat{y}=φ (k). θ (k-1) !$ e !$ ε (k) !$ o erro de estimação.
Em relação ao MQR, NÃO É CORRETO afirmar que:
Provas
Com relação à função de transferência descrita abaixo, marque ( V ) para as afirmativas verdadeiras e ( F ) para as falsas.
!$ {\large{Y(z^{-1}) \over X(z^{-1})}}={\large{(1-0,625.z^{-1}).z{-1} \over 1-0,75.z^{-1}+0,125.z^{-2}}} !$
( ) Esta é uma função de transferência de um sistema discreto de segunda ordem com polos em 0,5 e 0,25.
( ) Esta função representa um sistema instável, pois os polos discretos estão localizados à direita do plano complexo.
( ) O valor de regime da resposta ao degrau unitário do sistema representado por esta função é 1.
( ) Esta função representa um sistema causal.
( ) Esta função representa um sistema subamortecido.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Provas
Provas
Analise os gráficos abaixo.
GRÁFICO 1
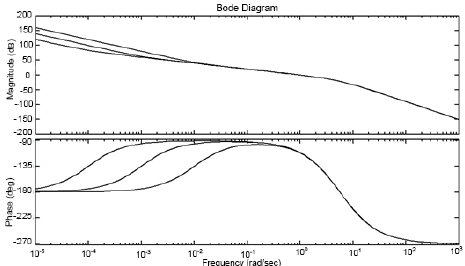
GRÁFICO 2
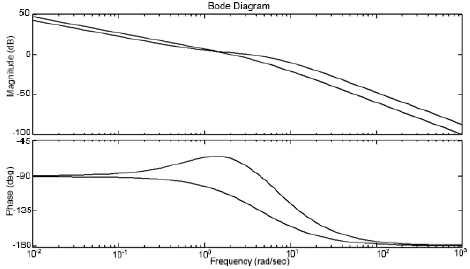
Quais ações de controle foram implementadas, respectivamente, em cada um deles?
Provas
Um controlador proporcional-derivativo (PD) é sensibilizado por um desvio que se manifesta com uma velocidade de 20%/min. Considerando VP > SV, ação direta; Kp =2; KD=0, 20 min e So= 45%, qual a saída do controlador 15 segundos após o início do desvio?
Provas
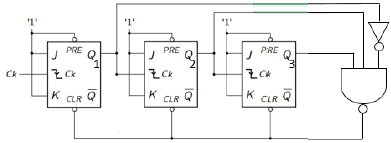
Uma parte do controle do processo de fabricação de uma peça de aço possui a tabela verdade abaixo.
| C | B | A | Y |
| 0 | 0 | 0 | 1 |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 0 |
| 1 | 0 | 1 | 0 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 |
Determine a equação simplificada da saída Y.
Provas
Caderno Container