Foram encontradas 829 questões.
“É um Robô que possui duas juntas dispostas em paralelo para se ter movimento em um plano e uma junta prismática perpendicular a este plano (PRR), apresentando, portanto, uma translação e duas rotações.”
As características descritas no texto acima são de um robô do tipo:
Provas
Considere o sistema 1 e o sistema 2 independentes, a função de transferência FT1 refere-se ao sistema 1 e função de transferência FT2 refere-se ao sistema 2. Ambos os sistemas são de entrada limitada e saída limitada (BIBO – Bounded Input Bounded Output).
|
FT1(S) = 1 !$ \overline{S^{2}+4S+5} !$
|
|
FT2(S) = !$ \dfrac{1}{S^{3}+5S^{2}+10S+60} !$ |
Conhecidas as Funções de Transferência dos sistemas 1 e 2, analise a estabilidade de cada sistema.
Provas
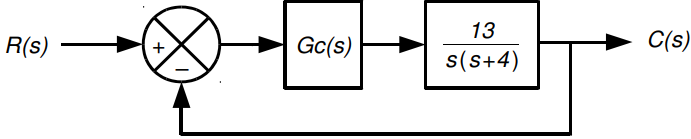
Considerando o sistema de controle de malha fechada abaixo. (Dado a função de transferência para um sistema de controle em malha fechada)
Assinale a alternativa que apresenta o(s) valor(es) de k que garante a estabilidade do sistema.
Provas
Em relação aos arranjos físicos e às instalações de máquinas e equipamentos, as vias principais de circulação nos locais de trabalho e as que conduzem às saídas devem ter:
Provas
Sobre a estabilidade de sistemas lineares, pode-se afirmar que:
I. Um sistema com realimentação em malha fechada é dito estável se a resposta da sua saída é limitada em magnitude, dada uma perturbação limitada na sua entrada.
II. Um sistema linear é estável se e somente se o valor absoluto de sua resposta ao impulso, integrada sobre um intervalo finito, é finita.
III. Um sistema com realimentação em malha fechada é dito estável se todos os polos da função de transferência do sistema tenham parte real negativa.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Provas
Um sistema de controle mostra na figura abaixo, com função de transferência H(s) = C(s)/R(s), possui um controlador por atraso de fase G c (s) = (s+ aT 1 ) K . (s+ T 1 ) , tal que a constante de erro estático de velocidade é K = 26/s . Sobre o sistema H(s), é possível afirmar que:
I. Os polos originais do sistema em malha fechada, para Gc(s)=1, são iguais a -2+j3 e - 2-j3;
II. O sistema de controle H(s) é estável para qualquer valor onde K > 0 e T > 1;
III. A condição de erro estático de velocidade pode ser satisfeita com K=1, T=10 e a=0,25;
IV. A condição de erro estático de velocidade pode ser satisfeita com K=1, T=10 e a=8;
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Provas
A figura (1) mostra o lugar das raízes para um sistema em malha fechada G(s) = C(s)/R(s), de fase não mínima, mostrado na figura (2). Considere que o sistema em malha fechada é estável para 0 < K < KM. Assinale a alternativa que apresenta CORRETAMENTE os valores para KM, Ta e T.
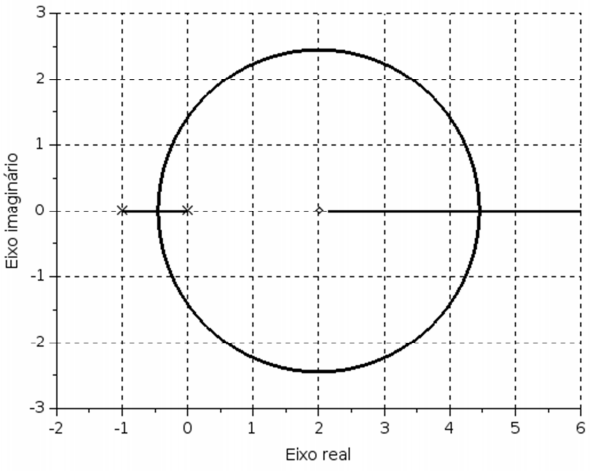
Figura 1
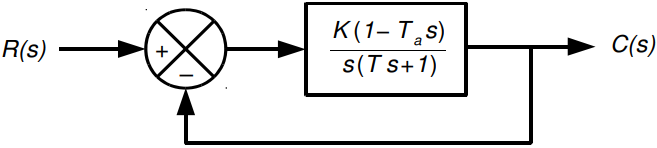
Figura 2
Provas
Considere um o sistema linear C(s)/R(s) em malha fechada como o mostrado na figura. Assinale a alternativa que apresenta CORRETAMENTE a faixa de valores para a constante K que garanta a estabilidade do sistema, conforme o critério de Routh.

Provas
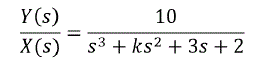
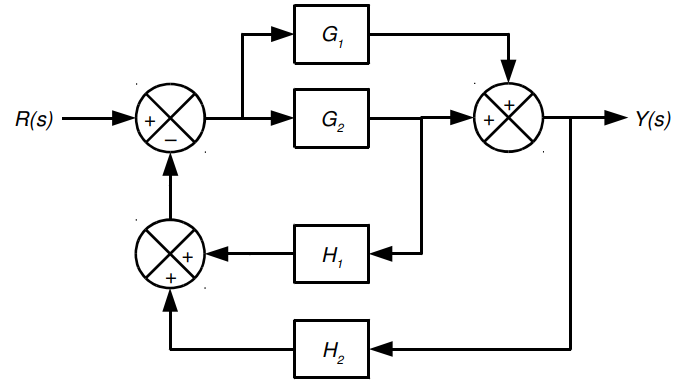
Assinale a alternativa que apresenta CORRETAMENTE a equação de função de transferência simplificada de um sistema linear representado através do diagrama de blocos mostrado na figura:
Provas
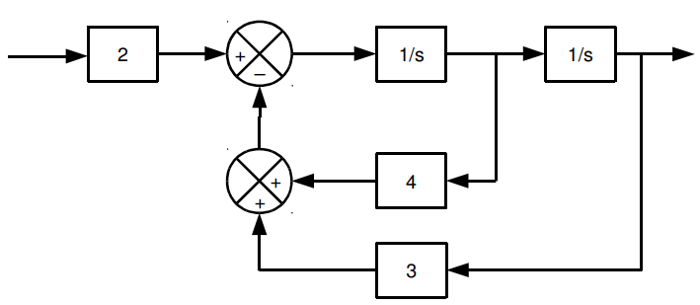
Assinale a alternativa que apresenta CORRETAMENTE a representação na forma matricial das equações de espaço de estados do sistema mostrado na figura, sendo A a matriz de estado, B a matriz de entrada, C a matriz de saída e D a matriz que transmissão direta.
Provas
Caderno Container