Foram encontradas 1.866 questões.
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
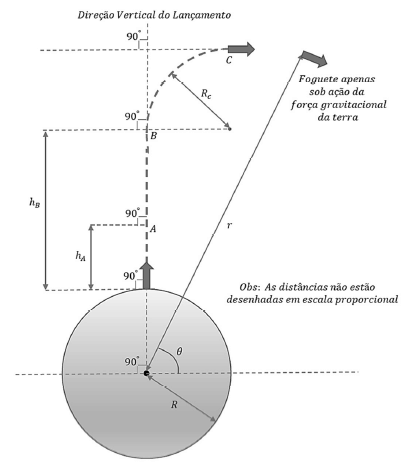
Um foguete é lançado da superfície da Terra em um processo de três estágios, conforme descritos a seguir e esquematicamente ilustrados na figura anterior.
• Estágio 1 – O foguete é acelerado uniformemente até o ponto A, de altura hA, com uma aceleração !$ \vec{a} !$, cujo módulo é igual ao valor da aceleração da gravidade g na superfície da Terra.
• Estágio 2 – O foguete mantém-se em movimento retilíneo uniforme vertical ascendente até o ponto B, de altura hB.
• Estágio 3 – O foguete faz uma curva circular de raio RC até o ponto C, de tal modo que sua direção de movimento sofra uma alteração de 90 graus. O módulo de sua velocidade permanece constante e igual ao módulo da velocidade do foguete no estágio 2.
velocidade do foguete nos estágios 2 e 3 é representada por !$ \vec{v} !$. Nos três estágios, atuam sempre sobre o foguete a sua força de impulsão !$ \vec{F} !$ e a força !$ \vec{P} !$, devido à atração gravitacional da Terra. No estágio 1, além dessas forças, atua, também, uma força de resistência do ar !$ \vec{R} !$, que sempre aponta na direção contrária à direção do movimento. Depois do estágio 3, o foguete fica livre e sob a ação apenas da força gravitacional da Terra. Nessa fase, a posição do foguete pode ser descrita a partir de sua distância !$ r !$ até o centro da Terra e o ângulo polar !$ \theta !$ entre a direção da linha radial que liga o centro da Terra até o foguete, e a direção do foguete ao final do estágio 3. As massas da Terra e do foguete são, respectivamente, representadas por mT e mf. A massa da Terra está distribuída, uniformemente, em uma esfera de raio R. As distâncias indicadas nos estágios 1, 2 e 3, em função do raio da Terra R, são, respectivamente, hA = 0,02 R, hB = 5 R e RC = R.
Acerca dessa situação hipotética e considerando-se que a massa do foguete permanece constante ao longo de seu movimento, que a aceleração da gravidade g valha 10 m/s2 e que o raio da Terra R seja igual a 6.500 km, julgue o item subsecutivo.
Até o foguete atingir o ponto A, a força resultante !$ \vec{F}_{res} !$ sobre ele será tal que !$ |\vec{F}_{res}|=|\vec{F}|-|\vec{P}|-|\vec{R}| !$.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
Julgue o item subsequente, com relação a veículos lançadores orbitais e sub orbitais.
Ruídos de decolagem de veículos lançadores de satélites podem atingir níveis superior a 150 dB; o ruído aerodinâmico dos ignitores e das câmeras de combustão geram ondas de choque que podem resultar no colapso do veículo lançador.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
Para o controle de atitude, sistemas sensores com partes móveis são largamente utilizados em satélites; o ring laser gyroscope (RLG) é composto apenas por uma combinação de vidros cerâmicos e várias fontes multi-espectrais de luz.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
Em geral, giroscópios formam a base do sistema sensor para o controle de atitude do satélite; o motor do giroscópio é montado em um suporte móvel simples, controlado com alta precisão. A razão de precessão do giroscópio fornece a medida do torque necessária para o ajuste de qualquer eixo do satélite.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
Na ausência de forças externas, as equações de Euler para um corpo rígido mostram que a rotação do corpo em torno de qualquer um dos seus eixos principais é possível. A questão a resolvida no projeto do satélite será relativa à escolha do melhor eixo para a realização da estabilização por spin.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
O controle de atitude de satélites é realizado via atuador, após comando do ângulo de referência escolhido, rotina de controle de torque e sensor de dinâmica da atitude do veículo espacial.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
O fibre optic gyroscope (FOG) é um giroscópio utilizado em satélite mais leve que o RLG, pois o bloco contendo os prismas é eliminado.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
Os ângulos de Euler formam três quantidades independentes capazes de definir a posição do eixo do corpo em termos de (x, y, z), em relação a um sistema de coordenadas inercial. A matriz de transferência ou transformação, que representa a rotação do corpo em torno do eixo-z, e a matriz de rotação em termos das velocidades angulares e dos ângulos de Euler são equivalentes.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
A dinâmica da atitude de um veículo espacial é baseada primariamente nas equações da dinâmica orbital de corpos rígidos. Os movimentos, posições e atitudes podem ser representados por sistemas de coordenadas fixadas no eixo do veículo e(ou) em sistemas de coordenadas inerciais; a partir deles é possível prever e avaliar acelerações e rotações do veículo.
Provas
Disciplina: Engenharia Aeronáutica e Espacial
Banca: CESPE / CEBRASPE
Orgão: TELEBRAS
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
Na determinação dos parâmetros orbitais de veículos espaciais, para analisar o movimento de rotação do veículo em relação a Terra, adota-se um sistema de coordenadas inercial R(X, Y, Z); nesse caso, a aceleração av do veículo em relação ao sistema inercial, será escrita como a seguir, em que W é o vetor velocidade de rotação da Terra e ar = (g – 2 W × vr).
!$ a_v = W \times W \times R + a_r + W \times W \times r + 2W \times r !$
Provas
Caderno Container