Foram encontradas 80 questões.
Considere a seguinte figura para a questão.

Considerando as seguintes funções de transferência para esse sistema

onde o valor de K > 0 representa ganho a ser ajustado no controlador proporcional, conclui-se que o sistema em malha fechada se tornará
Provas
Considere a seguinte figura para a questão.
Considerando as seguintes funções de transferência para esse sistema:
onde o valor de K > 0 representa ganho a ser ajustado no controlador proporcional, conclui-se que o sistema em malha fechada será
Provas
Considere a seguinte figura para a questão.
Considerando as seguintes funções de transferência para esse sistema:
!$ G_1(s) = K { \large s + 2 \over s} !$ (controlador PI)
!$ G_2 = { \large (s -2) \over ( s+ 1) ( s -1)} !$ (Planta)
!$ H(s) = 1 !$ (Realimentação unitária)
onde o valor de K > 0 representa ganho a ser ajustado no controlador PI. Pelo lugar das raízes, conclui-se que o sistema em malha fechada será
Provas
Considere a seguinte figura para a questão.
A função de transferência que relaciona o erro !$ \varepsilon !$ com o distúrbio !$ U !$ é
Provas
Com relação às propriedades de sistema de controle em malha fechada lineares e invariantes no tempo com realimentação negativa, analise as afirmativas a seguir:
I. Sistemas do tipo 1 apresentam erro em regime permanente nulo quando submetidos a uma entrada rampa.
II. Controladores PI introduzem um polo na origem e um zero variável.
III. Controladores PD são indicados para sistemas com grande quantidade de inércia.
IV. Controladores proporcionais são usados para a eliminação de offsets.
Estão corretas as afirmativas
Provas
Com relação às propriedades do Diagrama de Bode, analise as afirmativas a seguir:
I. O conhecimento da resposta em frequência da função de transferência de malha aberta de um sistema de controle com realimentação negativa não permite concluir nada acerca da estabilidade do sistema em malha fechada.
II. O diagrama de Bode em amplitude de um sistema com dois polos e um zero finito apresenta um decaimento de – 40 dB/década em altas frequências.
III. O valor de pico do gráfico do diagrama de Bode em amplitude de um sistema de segunda ordem sem zeros finitos chama-se frequência de ressonância, a qual é zero para um coeficiente de amortecimento igual a 1.
IV. A frequência de corte, em radianos por segundo, de um sistema de primeira ordem sem zero finito é numericamente igual ao inverso da sua constante de tempo, em segundos.
Está(ão) correta(s) a(s) afirmativa(s)
Provas
Seja um sistema linear e invariante no tempo definido pelo seu modelo em espaço de estados
!$ { \begin{cases} \dot{x} = { \begin{bmatrix}\,\,\,0\,\,\,\,\,\,\,1\,\,\,\\-b/m\,\,-K/m \end{bmatrix}} x + { \begin{bmatrix}\,\,0\,\,\\1/m \end{bmatrix}} x_i\\ x_o = [ K\,\,b] x \end{cases}} !$
A função de transferência !$ X_o (S) / X_i (S) !$ é
Provas
Um sistema de controle linear e contínuo, com realimentação de saída, apresenta uma estrutura de compensação na malha direta, em série com a planta, cuja função de transferência é !$ G = { \large 1 \over 2} . { \large s + 2 \over s +1} !$.
Esse compensador é do tipo
Provas
Com relação ao diagrama do lugar das raízes de um sistema de controle em malha fechada, analise as afirmativas a seguir:
I. O número de ramos no diagrama corresponde à ordem relativa do sistema.
II. O número de ramos do diagrama que caminha para o infinito corresponde à diferença entre o número de polos e o número de zeros na função de transferência de malha aberta.
III. O sistema em malha fechada somente será estável para os valores de ganho em que todas as correspondentes posições dos polos, nos ramos, estiverem no semiplano esquerdo.
IV. O lugar das raízes é simétrico em relação ao eixo imaginário.
Estão corretas as afirmativas
Provas
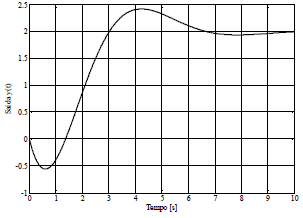
A figura abaixo apresenta a resposta ao degrau unitário para um determinado sistema. Com essas informações, deduz-se que a função de transferência que modela o sistema é
Provas
Caderno Container