Foram encontradas 58 questões.
Para uma representação discreta (ou a tempo discreto) no espaço de estados, um sistema linear S1 é definido por x(1+ k ) = Ax(k) + Bu(k) e y(k) = Cx(k) + Du(k) , em que: o vetor de estado x∈ ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈ n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.
Empregando as denominações de matriz de dinâmica (A ), matriz de entradas (B ), matriz de saída (C) e matriz de transmissão direta (D), para T ≠ I (a matriz de transformação não é a matriz identidade), ao se comparar as propriedades, as matrizes e os vetores dos dois sistemas, verifica-se que: ; o vetor de saída y∈ ; o vetor de entrada u∈; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
n×n | ∃T−1 , define-se o sistema S2.Provas
Questão presente nas seguintes provas
Ao artifício pelo qual utiliza-se uma pequena memória SRAM veloz para armazenar códigos ou dados mais frequentes e uma memória grande DRAM, mais barata, para armazenar a grande quantidade de códigos ou dados que não são acessados com grande frequência, dá-se o nome de:
Provas
Questão presente nas seguintes provas
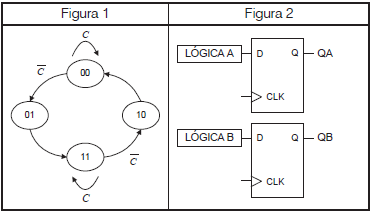
A Figura 1, acima, mostra um diagrama de quatro estados definidos pelos bits B e A, sendo B o mais significativo, e pelo bit de controle C.
A Figura 2, por sua vez, mostra uma implementação síncrona desse diagrama de estados com o uso de flip-flops D e das lógicas A e B.
Estas lógicas devem ser, respectivamente:
Provas
Questão presente nas seguintes provas
No processo de automação industrial, alguns fatores e componentes merecem destacada consideração e análise. Em particular, os acionadores para motores de indução a corrente alternada (CA), por controlar as variáveis elétricas – tensão e corrente – nos enrolamentos do estator do motor, permitem o controle desses motores de forma a obter o desempenho desejado (supondo que o comportamento é viável tecnicamente), com ajuste de torque, velocidade e/ou posição.
Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
Em relação aos tipos de acionadores, suas características e empregos, assinale a afirmativa correta.Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
Provas
Questão presente nas seguintes provas
O amplificador cascode utilizando transistores TBJ (Transistor Bipolar de Junção) apresenta a vantagem de combinar uma alta impedância de entrada com baixo ganho de tensão, minimizando a Capacitância Miller de entrada, além de uma boa operação em altas frequências.
Tais características são alcançadas pelo uso dos seguintes estágios amplificadores em série:
Tais características são alcançadas pelo uso dos seguintes estágios amplificadores em série:
Provas
Questão presente nas seguintes provas
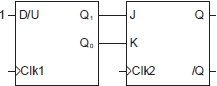
Contador Flip-Flop JK
A figura acima mostra um contador binário conectado a um flip-flop JK, ambos com entrada de clock acionada por borda. O contador está programado para decrementar (D/U = 1) e, no início da contagem, Q = Q1 = Q0 = 0, sendo Q1 mais significativo do que Q0. Além disso, cada pulso de clock do contador (Clk1) é seguido por um pulso de clock do flip-flop (Clk2), havendo tempo suficiente para a estabilização das saídas de ambos os dispositivos.
Provas
Questão presente nas seguintes provas
Uma planta industrial é composta por dois equipamentos que possuem modelos lineares ideais G1(s) e G2(s).
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por afirma-se:
afirma-se:
I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Assinale:A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.
Para as funções de transferências definidas por
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Provas
Questão presente nas seguintes provas
As funções de transferência podem ser estudadas em diversos aspectos na teoria de controle clássica. Uma análise fundamental a ser executada é a estabilidade, a qual pode ser feita com alguma das técnicas disponíveis na literatura sobre controle como, por exemplo, o critério de estabilidade de Routh.
Sobre a estabilidade das funções de transferência e
e 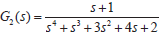 é correto afirmar que:
é correto afirmar que:
Sobre a estabilidade das funções de transferência
e é correto afirmar que:Provas
Questão presente nas seguintes provas
Considere um transistor MOSFET do tipo N (NMOS) com corpo aterrado e tensões de gate, dreno, fonte e limiar (threshold) dadas, respectivamente, por VG, VD, VS, e Vt.
Para que este transistor opere como uma fonte de corrente, é necessário que as seguintes relações sejam satisfeitas:
Para que este transistor opere como uma fonte de corrente, é necessário que as seguintes relações sejam satisfeitas:
Provas
Questão presente nas seguintes provas
Um programador de microcontroladores, pensando em uma maneira de realizar somas de dois números de 48 bits, escreveu um código assembly, utilizando registradores de 16 bits. A sua idéia foi fragmentar os números em 3 partes de 16 bits e armazená-los, um deles nos registradores ax (mais significativo), bx e cx (menos significativo) e o outro nos registradores dx (mais significativo), si e di (menos significativo).
Neste código, os resultados das somas parciais são guardados nos endereços var1, var2 e var3, para a realização das etapas posteriores necessárias à impressão do resultado final. Desta forma, considerando os fragmentos já armazenados nos seus respectivos registradores, o código desenvolvido pelo programador foi o seguinte:
add cx,di
mov [var1],cx
add bx, si
mov [var2],bx
add ax, dx
mov [var3], ax
Sobre o resultado a ser encontrado, o resultado esperado (entre parênteses), a correção do programa e a eficácia do teste, pode-se dizer que:
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container