Foram encontradas 1.866 questões.
Controlador proporcional integral derivativo. (controlador PID ou simplesmente PID) é uma técnica de controle de processos que une as ações derivativa, integral e proporcional, fazendo com que o sinal de erro seja minimizado pela ação proporcional, zerado pela ação integral e obtido com uma velocidade antecipava pela ação derivativa. O ganho proporcional é notado Kp, o ganho integral Ki = 1/Ti e o ganho derivado Kd com tempo de derivação Td. No domínio temporal discreto amostrado com um período Te, sua função de transferência C expressa nos termos de transformada em Z é:
Provas
O arrasto de atrito aumenta aproximadamente (influência de Reynolds) com o quadrado da velocidade. Por outro lado, o arrasto induzido diminui com a velocidade e tende a zero em velocidades muito altas. Há uma velocidade, acima da velocidade de estol, mas abaixo da razão de planeio máxima, na qual a potência de voo é mínima. Essa velocidade é a
Provas
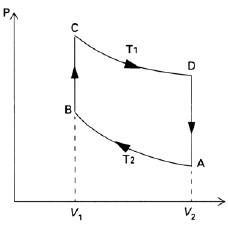
Um ciclo Stirling é composto por duas isotérmicas e duas isocores que se alternam, conforme representado na figura. O ciclo é assumido reversível; é descrito na direção do motor por um gás ideal e para este gás perfeito !$ γ !$=Cp/Cv, é assumido como constante.
A eficiência termodinâmica r desse ciclo é dada por
Provas
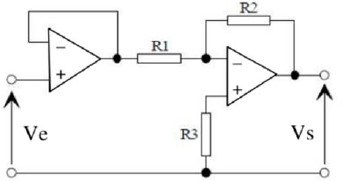
Considere esse circuito eletrônico com base em amplificadores operacionais reputados como ideais.
Qual é a expressão da função de transferência Vs / Ve?
Provas
Mudanças nas propriedades de um fluido em movimento podem ser medidas de duas maneiras diferentes. Pode-se medir uma determinada propriedade, realizando a medição em um ponto fixo no espaço, à medida que as partículas do fluido passam, ou seguindo uma parcela de fluido ao longo da respectiva linha de corrente. A derivada de um corpo em relação a uma posição fixa no espaço é chamada de derivada euleriana, enquanto a derivada que segue uma parcela em movimento é chamada de derivada advectiva ou material (ou lagrangiana).
Qual é a derivada material, definida como o operador não linear onde !$ \vec{u} !$ é a velocidade do fluxo?
Provas
No ano de 1873, James Clerk Maxwell unificou o magnetismo e a eletricidade com as agora famosas equações de Maxwell:
!$ ∇\cdot\vec{B}=0 !$ !$ ∇\cdot\vec{E}=\dfrac{ρ}{ε_0} !$
!$ ∇\times\vec{E}+\dfrac{∂\vec{B}}{∂t}=0 !$ !$ ∇\times\vec{B}-μ_0ε_0\dfrac{∂\vec{E}}{∂t}=μ_0\vec{J} !$
na forma diferencial, que pode ser resolvida pelos potenciais (!$ \vec{A} !$,!$ ∅ !$) definidos por !$ \vec{B} !$ = !$ ∇ \times\vec{A} !$ e !$ \vec{E}=- ∇∅-\dfrac{∂\vec{A}}{∂t} !$
A condição gauge de Lorenz especifica esses dois potenciais. Qual é essa relação?
Provas
Para uma barra cilíndrica de massa M, de raio R e altura h, o momento de inércia ao longo do eixo de revolução Oz da barra é
Provas
Em química, a equação de Henderson-Hasselbalch é uma equação que fornece o pH de um sistema tamponado H+ + A- !$ \rightleftharpoons !$ HA.
A equação pode ser obtida a partir da constante de acidez Ka de um ácido HA.
Definindo [A-] como a concentração do íon A-, [HA] como a concentração do ácido HA, a relação será
Provas
Considere o problema clássico de Sturm-Liouville regular a seguir.
!$ \dfrac{d}{dx} !$ !$ [p(x)\dfrac{dy}{dx}]+q(x)y=-λw(x)y !$, definido para !$ x !$ !$ ∈ !$ (!$ a,b !$) com condições de contorno do tipo Fourier-Robin. A sua resolução pode ser reduzida a um problema de análise funcional de um operador diferencial linear autoadjunto !$ L !$.
Qual proposta define o mais geral operador diferencial linear autoadjunto !$ L !$?
Provas
Segundo a apostila de Ajustagem Mecânica (SENAI-SP, 2008), a respeito das limas, analise as afirmativas:
I - São ferramentas manuais de aço carbono, denticulado e temperado.
Il - São utilizadas na operação de limar.
III - Classificam-se de acordo com a forma, o picado e o tamanho.
IV - Podem ter picado simples ou cruzado ou ser lisas.
V- Podem ser do tipo murça, bastarda ou bastardinha.
Está CORRETO o que se afirma em:
Provas
Caderno Container