Foram encontradas 50 questões.
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
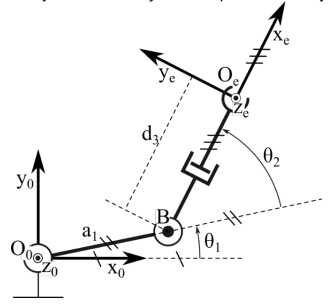
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
Provas
Questão presente nas seguintes provas
Entre os vários aspectos a serem considerados na especificação de um robô, é importante definir o
seu número de graus de liberdade. Com relação a esse assunto, é correto afirmar que:
Provas
Questão presente nas seguintes provas
CAPP (planejamento de processo auxiliado por computador, do inglês Computer-Aided Process
Planning) e CAM (manufatura auxiliada por computador, do inglês Computer-Aided Manufacturing)
consistem no planejamento e na preparação das instruções de operação detalhadas para
transformar um desenho de engenharia em produto final. Com relação ao CAPP e ao CAM,
indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a
sequência correta de cima para baixo.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
( ) O CAPP tem por base três formas de planejamento do trabalho: variante, automático e generativo.
( ) O CAPP tem as seguintes etapas básicas: sequenciamento de operações; determinação do maquinário e ferramentas aplicáveis; lubrificação de peças; definição das condições de processo e respectivos tempos de fabricação.
( ) O CAM pode ser classificado em duas grandes categorias, de acordo com o sistema computacional: sistemas computadorizados de controle e monitoração e sistemas de suporte da produção.
( ) Sistemas como MRP e programação CNC são exemplos de CAM.
( ) Na forma variante de CAPP, as peças são classificadas de acordo com semelhanças de caráter geométrico ou de utilidade.
Provas
Questão presente nas seguintes provas
Considerando os vários processos de fabricação existentes e suas respectivas características e
aplicações, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a
alternativa com a sequência correta de cima para baixo.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
( ) No processo de conformação mecânica por calandragem predominam os esforços de flexão quando comparado aos processos de forjamento e laminação.
( ) Existem três processos de fabricação para a união permanente de materiais: colagem, brasagem e soldagem.
( ) No processo de soldagem MIG, o gás de proteção participa de alterações metalúrgicas da poça de fusão.
( ) Furação não é um tipo de usinagem.
Provas
Questão presente nas seguintes provas
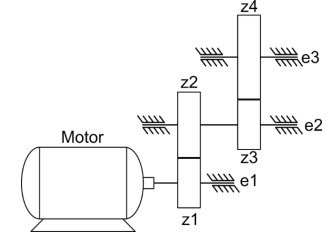
O esquema mecânico abaixo apresenta um motor elétrico e quatro engrenagens. No eixo e1 do
motor, encontra-se montada a primeira engrenagem, com número de dentes z1 = 18. A primeira
engrenagem está acoplada a uma segunda engrenagem, montada no eixo e2, com número de
dentes z2 = 36. No mesmo eixo e2, também está montada uma terceira engrenagem, com número
de dentes z3 = 14. A terceira engrenagem está acoplada a uma quarta engrenagem montada no
eixo e3, com número de dentes z4 = 56. Considere que os eixos e1, e2 e e3 são perfeitamente
paralelos e não sofrem atritos em seus mancais de montagem. Seja a velocidade angular de
rotação de saída do motor sobre o eixo e1 definida como ω1 e as velocidades angulares sobre os
eixos e2 e e3 definidas por ω2 e ω3, respectivamente. Também considere o torque de saída do
motor sobre o eixo e1 definido como T1 e os torques resultantes nos eixos e2 e e3 definidos,
respectivamente, por T2 e T3.
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
Provas
Questão presente nas seguintes provas
Nas juntas rebitadas, a tensão de cisalhamento nos rebites é definida por Tc= Q/A ≤ Td , onde Tc é a
tensão de cisalhamento que o rebite sofre devido à carga de cisalhamento Q, A é a área da
secção transversal do rebite e Td é a tensão admissível do material do rebite ao cisalhamento. A
esse respeito, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a
alternativa com a sequência correta de cima para baixo.
( ) Se a área A do rebite aumentar e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) Se a área A do rebite diminuir e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) A área do rebite varia proporcionalmente com a carga aplicada para que a tensão devido ao carregamento seja constante.
( ) Numa dada situação, ao ser trocado o rebite por outro rebite com material mais resistente e a carga permanecer constante, a área projetada do rebite pode diminuir.
( ) Se a área A do rebite aumentar e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) Se a área A do rebite diminuir e a carga Q permanecer constante, a tensão admissível do material diminui.
( ) A área do rebite varia proporcionalmente com a carga aplicada para que a tensão devido ao carregamento seja constante.
( ) Numa dada situação, ao ser trocado o rebite por outro rebite com material mais resistente e a carga permanecer constante, a área projetada do rebite pode diminuir.
Provas
Questão presente nas seguintes provas
Mancais são elementos de máquinas responsáveis por dar suporte ou guia onde eixos sejam
apoiados. A esse respeito, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e
assinale a alternativa com a sequência correta de cima para baixo.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
Provas
Questão presente nas seguintes provas
Com relação aos elementos de máquina, indique se as afirmativas a seguir são verdadeiras (V) ou
falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Rebites, cavilhas e pinos são elementos de máquina de fixação. ( ) O parafuso de rosca triangular tem aplicação na fixação de união de peças. ( ) Fusos de rosca quadrada têm aplicação na geração de movimento de ferramentas que sofrem esforços ou choques, como prensas e morsas. ( ) Atualmente as roscas triangulares são classificadas de acordo com seu perfil em três tipos: métrica, americana e Whitworth.
( ) Rebites, cavilhas e pinos são elementos de máquina de fixação. ( ) O parafuso de rosca triangular tem aplicação na fixação de união de peças. ( ) Fusos de rosca quadrada têm aplicação na geração de movimento de ferramentas que sofrem esforços ou choques, como prensas e morsas. ( ) Atualmente as roscas triangulares são classificadas de acordo com seu perfil em três tipos: métrica, americana e Whitworth.
Provas
Questão presente nas seguintes provas
Tomando por base a norma ISO 1219, o desenho abaixo apresenta um circuito pneumático
contendo uma válvula conectada a um cilindro pneumático. 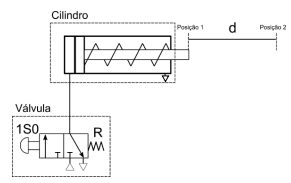
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
Com relação a esse circuito pneumático, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A válvula é direcional do tipo 3/2. ( ) A válvula tem acionamento mecânico e retorno por mola. ( ) A válvula é normalmente fechada de controle por solenoide. ( ) O cilindro tem retorno por mola. ( ) Quando o acionamento 1S0 for ativado, o pistão do cilindro avança linearmente até a posição 2 e retorna automaticamente até a posição 1, repetindo esse ciclo até que 1S0 seja desativado.
Provas
Questão presente nas seguintes provas
As redes de comunicação para automação industrial são classificadas em Sensorbus, Devicebus e
Fieldbus, de acordo com o tipo de controle, de dispositivos e de mensagens para os quais são
concebidas. Em relação a essa classificação, analise as afirmativas abaixo e assinale a alternativa
correta.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
I. As redes ASi são um exemplo típico de Sensorbus voltadas à comunicação de sensores e atuadores discretos.
II. As Devicebus são especificadas para comunicação de controladores lógicos programáveis e outros dispositivos de automação industrial cujas mensagens são predominantemente organizadas em bytes.
III. As altas taxas de transmissão de dados das redes Fieldbus garantem que os sinais digitais sejam transmitidos em tempo real entre os sensores e atuadores distribuídos nas malhas de controle do processo industrial.
IV. As barreiras de segurança intrínseca das redes Fieldbus permitem que estratégias de controle e de segurança sejam executas localmente nos atuadores instalados em áreas classificadas, sujeitas a risco de incêndio e explosão.
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container