Foram encontradas 45 questões.
a. Modulo 01; quantidade de falhas: 3; horas de teste: 2500.
b. Modulo 02; quantidade de falhas: 7; horas de teste: 2500.
c. Modulo 03; quantidade de falhas: 5; horas de teste: 2000.
d. Modulo 04; quantidade de falhas: 4; horas de teste: 1000.
Considere que cada placa é composta por um módulo de cada tipo, que as falhas de cada módulo são estatisticamente independentes e que os módulos da placa eletrônica podem ser representados como um sistema em série.
Com base nessas informações, estima-se que o MTTF (Tempo Médio até a Falha) e o MTBF (Média de Tempo Entre Falhas) da placa eletrônica sejam, respectivamente,
Provas
O NanosatC-BR é um nanossatélite brasileiro de propósito científico- tecnológico educacional, desenvolvido pelo INPE em parceria com a
UFSM. Um de seus objetivos científicos é realizar o monitoramento da magnetosfera da Terra por meio da medição do campo magnético terrestre sobre o Brasil, utilizando um magnetômetro de três eixos.
A figura abaixo apresenta o diagrama em blocos deste nanossatélite.
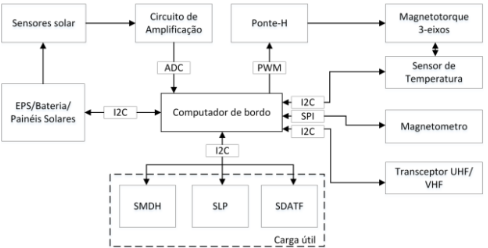
Com relação a estrutura do nanossatélite, analise os itens a seguir.
I. O barramento ADC é responsável por realizar a conversão analógico digital do sinal analógico amplificado proveniente dos sensores solares.
II. PWM é uma técnica utilizada para controlar a quantidade de energia entregue a um dispositivo elétrico, variando a frequência dos pulsos enquanto mantém a largura constante.
III. I2C e SPI são protocolos de comunicação. O I2C permite a comunicação bidirecional entre diferentes dispositivos integrados conectados em um mesmo barramento, enquanto o SPI é unidirecional, permitindo a transmissão de dados apenas do mestre para o escravo.
Está correto o que se afirma em
Provas
Para garantir a comunicação entre o pequeno satélite e a estação na terra, é crucial realizar o cálculo do enlace para determinar as especificações deste sistema. Em órbitas a uma altitude de 500 km, a distância máxima entre um transmissor e um receptor é de cerca de 2500 km (quando o satélite se encontra no horizonte), enquanto a distância mínima é de 500 km (quando o satélite está diretamente sobre a estação terrena). O cálculo do enlace pode ser conduzido empregando a equação de Friis:
\( P_{rx}=P_{tx}+G_{tx}+G_{rx}+20log_{10}(\dfrac{\lambda}{4\pi D_r}) \)
em que:
\( \lambda \) = Comprimento de onda em metros;
\( P_{rx} \) = Potência de RF no receptor em dBm;
\( P_{tx} \) = Potência de RF do transmissor em dBm;
\( G_{tx} \) = Ganho da antena do transmissor em dBi;
\( G_{rx} \) = Ganho da antena do receptor em dBi;
\( D_r \) = Distância entre transmissor e receptor em metros.
Deseja-se realizar o cálculo de enlace para que o satélite opere em todas as condições de distância. Sabe-se que para o satélite em questão o comprimento de onda é \( \pi \cdot 10^{-3}m \), o ganho de ambas as antenas é 20 dBi e a menor potência necessária no receptor para garantir as especificações é −120 dBm.
Para garantir que a especificação no receptor seja sempre atendida, a potência mínima do transmissor, em dBm, é de
Provas
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta N(s), dada por

Inicialmente, o valor do ganho do controlador K foi ajustado de forma a tornar o sistema em malha fechada criticamente amortecido.
Caso o ganho K seja ligeiramente aumentado, é esperado que o sistema tenha
Provas
Considere um sistema de controle com realimentação unitária, cuja função de transferência de malha aberta possui um polo na origem. Quanto ao erro de regime permanente ao seguir sinais do tipo degrau e rampa, esse sistema apresentará
Provas
A realimentação unitária é uma das estruturas de controle mais utilizadas para que um determinado sistema alcance o desempenho desejado.
Considere um determinado sistema de controle, composto de um controlador em série com uma planta, onde a saída da planta é Y(s) e a entrada do controlador é a diferença entre a referência do sistema R(s) e a saída da planta Y(s). Sabe-se ainda que tal sistema possui a função de transferência em malha fechada T(s), dada por
\( T(s)=\dfrac{1}{(As+1)} \), com \( A > 0 \)
Nessas condições, a função de transferência em malha aberta desse sistema é
Provas
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta M(s), dada por

Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em
Provas
Em um sistema embarcado, o hardware e o software cooperam de forma integrada, sendo utilizados em uma ampla variedade de produtos, desde os mais simples até os mais complexos. A seleção do sistema operacional é um aspecto crucial que influencia significativamente o desenvolvimento de uma solução embarcada, pois afeta não apenas a facilidade de operação em tempo real, mas também a facilidade de desenvolvimento e o desempenho. Entre os diversos sistemas operacionais disponíveis para sistemas embarcados, destacam-se o FreeRTOS, Android e Linux embarcado. Acerca desses três sistemas operacionais, analise os itens a seguir.
I. O sistema operacional Android é completamente fechado (closed-source), sem nenhuma parte do seu código-fonte disponível para o público.
II. Uma das vantagens do FreeRTOS é a previsibilidade. Entre os três sistemas operacionais, ele é o mais indicado para aplicações em tempo real que exigem um comportamento determinístico.
III. O Linux embarcado proporciona uma flexibilidade superior à do FreeRTOS, pois durante o desenvolvimento de um sistema embarcado, é mais viável localizar um driver para o hardware, muitas vezes disponibilizado pelo fabricante.
Está correto o que se afirma em
Provas
No projeto de um sistema embarcado, busca-se simultaneamente minimizar diversos fatores críticos, como: tamanho, custo unitário, desempenho, consumo de energia e custos associados ao desenvolvimento de hardware e software. Entre as tecnologias frequentemente utilizadas em aplicações embarcadas, destacam-se três: FPGA, microcontroladores e DSPs. Dentro do contexto comparativo dessas três tecnologias, analise as afirmativas a seguir.
I. As vantagens dos FPGAs incluem facilidade de simulação e teste, tornando-os uma alternativa para sistemas críticos. Para projetos menores, como sistemas embarcados, são econômicos e consomem menos energia que microcontroladores e DSPs. Sua flexibilidade e capacidade de reconfiguração os tornam ideais para aplicações que exigem adaptações frequentes.
II. Os microcontroladores mais simples operam em palavras de 8 bits e são adequados para aplicações com requisitos modestos de memória e lógica. Eles podem consumir quantidades extremamente baixas de energia e frequentemente incluem um modo de suspensão que reduz o consumo de energia para ordem de nanowatts.
III. Dispositivos DSP são microprocessadores de propósito específico projetados para realizar processamento digital de sinais. Eles utilizam arquiteturas especiais com cache e estágios de pipeline para acelerar cálculos repetitivos e intensivos numericamente.
Está correto o que se afirma em
Provas
O ciclo de vida do desenvolvimento de software embarcado é um processo abrangente que aborda todas as etapas desde a concepção até a implantação e manutenção de um sistema embarcado. Esse ciclo de vida é crucial para garantir que o software embarcado atenda aos requisitos de qualidade, desempenho e confiabilidade. O ciclo de vida do desenvolvimento de software embarcado pode ser simplificado em sete etapas principais:
1. _____
2. _____
3. _____
4. _____
5. Depuração
6. Implantação
7. Manutenção
As etapas 1, 2, 3 e 4 são definidas, respectivamente,
Provas
Caderno Container