Foram encontradas 40 questões.
Strain gage ou extensômetros de deformação elétricos são sensores empregados em células de carga para a medição de força e massa. Com relação ao seu princípio de funcionamento dos sensores e da célula de carga, avalie o acerto das afirmações adiante e marque com V as verdadeiras e com F as falsas.
( ) Os sensores operam por princípios resistivos
( ) Para uma célula de carga operando em ponte completa são necessários no mínimo 8 sensores
( ) Quando sofrem alongamento os sensores diminuem a sua resistência elétrica
( ) A sensibilidade da célula de carga depende da tensão elétrica de alimentação
( ) O sinal de saída de uma célula de carga é da ordem de volts, não necessitando de amplificação
Marque a opção que contenha a sequência CORRETA, de cima para baixo:
Provas
Ao avaliar uma balança empregando uma massa padrão de 200,1 g medida 5 vezes foram encontrados os seguintes resultados:
Medição | Indicação |
1 | 199,6 |
2 | 199,4 |
3 | 199,8 |
4 | 199,5 |
5 | 199,6 |
Média | 199,58 |
Desvio-padrão | 0,15 |
Sabendo que a constante t de student para 5 repetições é igual a 2,87, os valores estimados do erro sistemático e do erro aleatório dessa balança são, respectivamente:
Provas
Com relação a elementos de máquinas presentes em sistemas de movimentação linear, marque (V) para as afirmativas verdadeiras e (F), para as falsas.
( ) Mancais do tipo apoio são empregados na extremidade de fusos de esfera para permitir deslocamentos axiais, como por exemplo, os efeitos de dilatação térmica de diferentes materiais empregados em sistemas de movimentação linear.
( ) Fusos de esfera longos e esbeltos não estão sujeitos ao fenômeno de velocidade crítica quando tendem a girar sobre seu próprio eixo alcançando amplitudes perigosas e tendência de vibração.
( ) Contraporca é um elemento empregado na extremidade de um eixo para fixá-lo de um lado evitando seu deslocamento radial.
( ) Acoplamentos flexíveis são projetados para transmitir torque de maneira suave e permitir certo desalinhamento axial, radial e angular.
( ) Quando utilizados acoplamentos rígidos, a falha prematura por cisalhamento poderá ser induzida nos eixos caso o alinhamento não puder ser mantido com precisão.
( ) Os rolamentos lineares de esferas recirculantes são componentes mecânicos utilizados para montar sistemas de movimentação linear simples e econômicos para uma grande variedade de aplicações mecatrônicas.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Provas
Sobre o programa NC abaixo, elaborado conforme a linguagem FANUC, analise as afirmações apresentadas a seguir e marque a opção CORRETA.
O0001
N10 G17 G21 G90 G94;
N20 G53 G0 Z0 H0;
N30 T10 (FRESA DE TOPO DE 20 mm);
N40 M6;
N50 G54 S2500 M3;
N60 G0 X-20 Y40 M8;
N70 G0 G43 H10 D10 Z5;
N80 G1 Z-5 F5000;
N90 G41 G1 X0 F1500;
N100 Y100;
N110 X120;
N120 Y0;
N130 X0;
N140 Y60;
N150 G40 X-20;
N160 G0 Z5 M9;
N170 M30;
Provas
Ao acionar um sinal de entrada degrau unitário, observa-se a curva de resposta em malha aberta de um sistema conforme a figura:
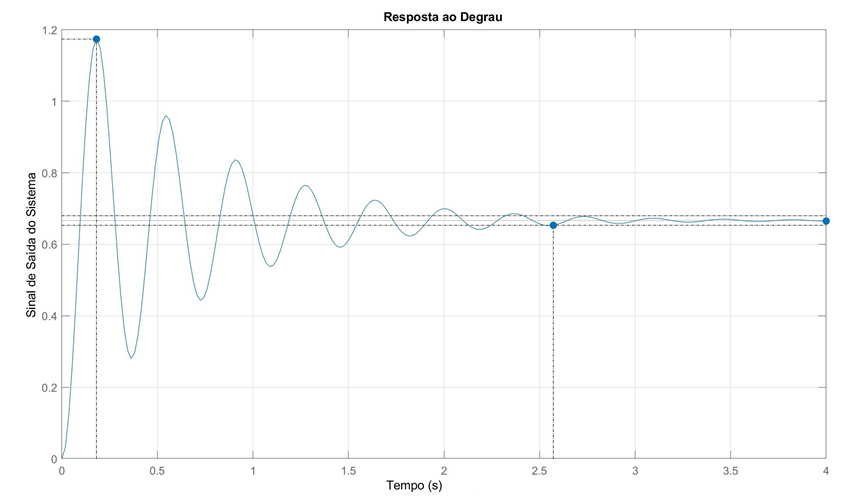
Pode-se dizer que:
Provas
Considerando as normas brasileiras vigentes quanta à segurança de máquinas e dispositivos e os conceitos de segurança em instalações e serviços em eletricidade, assinale a alternativa INCORRETA:
Provas
O torque necessário para o acionamento de fusos de esfera em sistemas de movimentação linear, como o representado na figura abaixo, é dado por:
!$ T_a=\dfrac{F_al}{2\pi n_1} !$
(desprezando-se a pré-carga da castanha e o torque de resistência do rolamento).
Calcule o torque de acionamento necessário, considerando: o peso total (W1+W2) igual a 1kN; coeficiente de atrito das guias igual a 0,003 e fuso com: diâmetro de 33 mm, avanço de 10 mm e eficiência de 96%.

Fonte: adaptado do catálogo “Linear Motion– NSK”.
Provas
Dado um controlador PID (Proporcional-Integral-Derivativo), cuja função de transferência é dada por: C(s)=Kp+Ki/s+Kd.s
Observa-se no ajuste dos parâmetros Kp, Ki, Kd do controlador que:
I. Ao acionar a ação integradora (Ki > 0) garante-se resposta com erro nulo em regime permanente, independente da magnitude de Ki.
II. Ao aumentar o valor da ação proporcional (Kp), consegue-se estabilizar o sistema, reduzindo possíveis oscilações na resposta.
III. A ação derivativa (Kd) pode ser acionada para corrigir o erro em regime permanente, sem conseguir zerá-lo.
Sobre as afirmações acima, pode-se dizer que:
Provas
A partir das seguintes afirmações sobre sensores e transdutores para medição de posição:
I. Os potenciômetros, fabricados em diversos tamanhos e formatos, podem ser utilizados como sensores de posição;
II. Os encoders incrementais são dispositivos utilizados para medir posição ou velocidade angular e sua resolução é dada pelo número de pulsos por revolução;
III. O transformador diferencial linear variável (LVDT, do inglês Linear Variable Differential Transformer) é um transdutor de deslocamento utilizado, por exemplo, em válvulas proporcionais pneumáticas.
Pode-se afirmar que
Provas
Considere o manipulador planar representado na figura abaixo. D e θ representam as variáveis de junta prismática e rotacional, respectivamente. A posição do efetuador final, montado na extremidade do elo 2 é definida pelo ponto P( x , y) .

Assinale a alternativa que representa o conjunto de equações referentes às coordenadas do ponto P( x , y) , determinadas em relação ao sistema de referência cartesiano Ox y .
Provas
Caderno Container