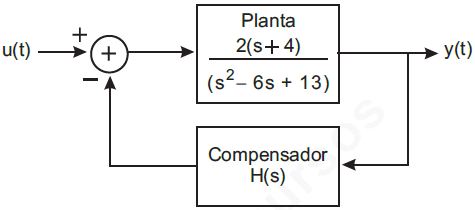
A figura ilustra uma planta industrial controlada por meio de um compensador H(s). O modelo da planta está representado na figura por sua função de transferência.
Considere que tenha sido utilizado o compensador H(s) = !$ { large 5(s , + , 10) over s} !$. Com relação à capacidade da saída y(t) de o sistema em malha fechada rastrear os sinais aplicados em u(t), caso seja aplicado um sinal do tipo