Foram encontradas 9.150 questões.
O menor caminho entre dois pontos no elipsoide de revolução é
Provas
Questão presente nas seguintes provas
Para localizar determinado ponto na superfície terrestre a partir
da linha do equador, utiliza-se uma medida angular que varia de
0º
a 90° ao norte e de 0º
a –90° ao sul denominada
Provas
Questão presente nas seguintes provas
O sistema de referência geodésico oficial utilizado atualmente
para o SGB é o
Provas
Questão presente nas seguintes provas
Julgue os itens a seguir, a respeito do elipsoide de revolução,
superfície de referência utilizada nos cálculos que fornecem
subsídios para a elaboração de representação cartográfica.
I O elipsoide de revolução é a superfície matemática que mais se aproxima da superfície real da Terra.
II Um elipsoide de revolução é definido por meio de dois parâmetros: o semieixo maior e o semieixo menor.
III O elipsoide de revolução, utilizado em geodésia, é um sólido geométrico gerado pela rotação de uma elipse em torno do seu eixo maior.
Assinale a opção correta.
I O elipsoide de revolução é a superfície matemática que mais se aproxima da superfície real da Terra.
II Um elipsoide de revolução é definido por meio de dois parâmetros: o semieixo maior e o semieixo menor.
III O elipsoide de revolução, utilizado em geodésia, é um sólido geométrico gerado pela rotação de uma elipse em torno do seu eixo maior.
Assinale a opção correta.
Provas
Questão presente nas seguintes provas
Ao realizar um trabalho de georreferenciamento em
determinado imóvel rural, o responsável técnico, cujo código
constante na Carteira Nacional de Credenciamento emitida pelo
INCRA é JQLQ, necessita identificar o 45.º vértice medido por
ele e que se localiza em um curso de água na divisa da
propriedade.
Nessa situação hipotética, e considerando as normas vigentes para a codificação de vértices em imóveis rurais, o referido vértice terá a identificação única
Nessa situação hipotética, e considerando as normas vigentes para a codificação de vértices em imóveis rurais, o referido vértice terá a identificação única
Provas
Questão presente nas seguintes provas
Para determinar as posições em latitude, longitude e altitude
geodésica (altitude em relação ao elipsoide), o SGB utiliza um
datum
Provas
Questão presente nas seguintes provas
O objetivo de um sistema de referência geodésico é o de
disponibilizar, implantar e manter uma infraestrutura básica para
o levantamento de posição de pontos na superfície da Terra.
Acerca do Sistema Geodésico Brasileiro (SGB), julgue os itens a
seguir.
I O SGB é composto pelas redes planimétrica, altimétrica e gravimétrica.
II O Instituto Nacional de Pesquisas Espaciais é responsável pela definição, implantação e manutenção do SGB.
III A materialização de posições do SGB é realizada por meio de marcos localizados ao longo do Estado brasileiro e em sua fronteira.
Assinale a opção correta.
I O SGB é composto pelas redes planimétrica, altimétrica e gravimétrica.
II O Instituto Nacional de Pesquisas Espaciais é responsável pela definição, implantação e manutenção do SGB.
III A materialização de posições do SGB é realizada por meio de marcos localizados ao longo do Estado brasileiro e em sua fronteira.
Assinale a opção correta.
Provas
Questão presente nas seguintes provas
Para facilitar a identificação de diferentes fenômenos ou feições em
um mapa cartográfico, utilizam-se diferentes cores, tal que cada
cor representa um tipo específico de fenômeno. Nesse sentido, as
cores azul, verde, marrom e vermelho normalmente são
utilizadas para representar, respectivamente,
Provas
Questão presente nas seguintes provas
Na situação da figura precedente, que representa parte de uma
mira utilizada em levantamentos topográficos, a leitura correta
dessa mira é de

Provas
Questão presente nas seguintes provas
A figura a seguir ilustra, sem controle de escala, um
levantamento topográfico em um terreno hipotético envolvendo
um teodolito localizado no ponto P e uma mira localizada no
ponto Q. Na figura, H = 1,5 m é a altura do teodolito; h = 2,5 m é
a leitura na mira; DH = 6 m é a distância horizontal entre o
teodolito e a mira; e tan (α) = 0,2.
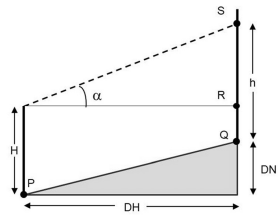
De acordo com as informações apresentadas, o desnível, DN, é igual a
De acordo com as informações apresentadas, o desnível, DN, é igual a
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container