Foram encontradas 9.150 questões.
Considerando a classificação dos erros de observação em grosseiros, sistemáticos e aleatórios, julgue o item a seguir.
Erro sistemático é o único tipo de erro que o método dos mínimos quadrados não consegue eliminar ou ajustar.
Provas
Os sistemas de geoinformações comerciais ou gratuitas apresentam várias ferramentas ou funções de armazenamento, manipulação e análise de dados espaciais. No que se refere a esse assunto, julgue o item subsequente.
A ferramenta merge é utilizada para transformar várias camadas (shapes) em uma única camada (shape).
Provas
Disciplina: Engenharia Cartográfica
Banca: Avança SP
Orgão: Pref. Vinhedo-SP
Transforme azimute em rumo: Az= 327º45’24”SW.
Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
Associe as definições com suas respectivas afirmativas, em seguida marque a alternativa que corresponde às informações encontradas na sequência CORRETA.
I. Carta ou Mapa
II. Croqui
III. Carta temática
IV. Legenda
( ) Representação gráfica com ausência de escala, realizado com breves traços para facilitar a identificação de detalhes.
( ) Representação gráfica sobre uma superfície plana, dos detalhes físicos, naturais e artificiais, de parte ou de toda a superfície terrestre.
( ) Tem por objetivo principal representar a informação geográfica sobre um determinado assunto.
( ) Convenções gráficas que ajudam a compreender os mapas.
Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
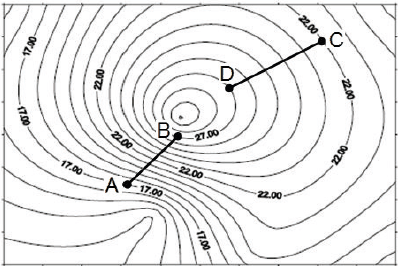
A figura a seguir é a representação esquemática do relevo com curvas de nível e valores das cotas em metros.
Analise a figura e marque a alternativa CORRETA.
Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
Marque a alternativa que indica CORRETAMENTE instrumentos auxiliares destinados às operações topográficas.
Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
As poligonais podem ser classificadas em principal, secundária e auxiliar. Analise as afirmativas a seguir e marque a alternativa CORRETA:
I - Poligonal principal: Poligonal que determina os pontos do apoio topográfico de primeira ordem.
II - Poligonal secundária: Aquela que, apoiada nos vértices da poligonal principal, determina os pontos do apoio topográfico de segunda ordem.
III - Poligonal auxiliar: Poligonal que, baseada nos pontos de apoio topográfico planimétrico, tem os seus vértices distribuídos na área ou faixa a ser levantada, de tal forma, que seja possível coletar, direta ou indiretamente, por irradiação, interseção ou por ordenadas sobre uma linha-base, os pontos de detalhe julgados importantes, que devem ser estabelecidos pela escala ou nível de detalhamento do levantamento.
Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
Leia as alternativas abaixo e marque a CORRETA.
Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
Considerando a imagem a seguir marque a alternativa que corresponde corretamente as leituras da mira.

Provas
Disciplina: Engenharia Cartográfica
Banca: FAUEL
Orgão: Pref. Paranavaí-PR
A construção de uma estrada rural exigiu do topógrafo um levantamento para traçar o greide culminando na determinação de algumas cotas na área, conforme representado na tabela:
| Estaca | Cota (metros) |
| 0 | 400,00 |
| 1 | 401,50 |
| 2 | 402,00 |
| 3 | 401,50 |
| 3+10 | 400,00 |
| 4 | 398,00 |
Considerando o espaçamento entre as estacas de 20 em 20 metros, marque a alternativa que apresenta corretamente a cota de um ponto situado a 13 metros de distância da estaca 1.
Provas
Caderno Container