Foram encontradas 50 questões.
Considere um potenciômetro de precisão multivoltas, utilizado para medir o ângulo em uma junta. Um conversor AD (analógico/digital) de 4 bits é usado para leitura deste sensor.
Neste caso, a resolução da medição será, em graus, de
Provas
Quais dos elementos sensores a seguir NÃO são utilizados para se estimar a orientação do robô no espaço?
Provas
Numere os eventos sequencialmente, do primeiro ao último passo, usados no algoritmo de planejamento 2D utilizando grafo de visibilidade.
( ) Aplique o algoritmo A* .
( ) Determine o espaço de configurações livres.
( ) Trace linhas de visibilidade entre a configuração alvo e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre a configuração inicial e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre todos os obstáculos.
A sequência correta de eventos é
Provas
Preencha corretamente as lacunas do texto a seguir com relação às características dos sensores presentes em robôs.
Em um manipulador industrial, o encoder óptico é um sensor usado para medir , sendo qualificado como . Já o laser é um sensor usado para medir , sendo classificado como .
Provas
Analise as asserções a seguir e a relação proposta entre elas.
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
Provas
O manipulador robótico observado na imagem a seguir representa uma variante do modelo SCARA.
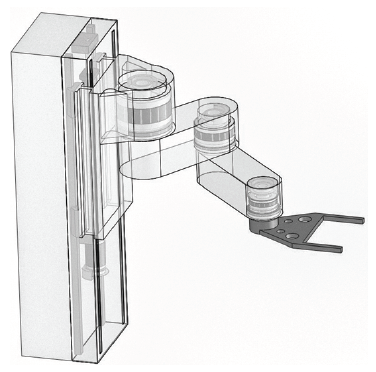
Sobre ele, é correto afirmar que possui
Provas
Considere o robô mostrado na figura a seguir, tentando alcançar um alvo atrás do obstáculo. Ele foi programado com o comportamento descrito na sequência de 1 até 6. Sensores de contato indicam a colisão com os obstáculos.
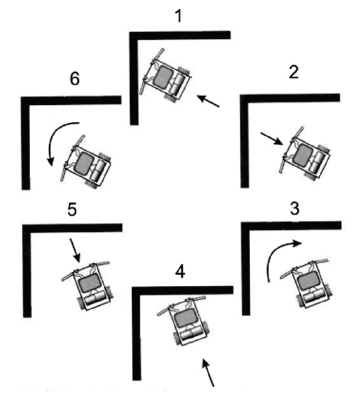
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô
Provas
Uma figura de mérito para avaliar sensores industriais é a relação entre o sinal e o ruído, chamada de SNR, do inglês Signal Noise Ratio. Calcule a relação SNR de um sinal cujo valor de tensão eficaz é 10V e seu ruído é 5mV, em dB.
O resultado está corretamente indicado em
Provas
Com relação à estratégia de controle via torque computado NÃO é correto afirmar que
Provas
Uma característica importante dos robôs industriais é sua versatilidade, a qual permite que sejam programados para executar atividades distintas. Avalie as afirmações sobre as maneiras de programação de tais dispositivos.
I - Na programação por aprendizagem, o operador humano posiciona as juntas em configurações sequenciais da trajetória desejada, usando um dispositivo eletrônico, que pode ser um joystick. Essas configurações são armazenadas pelo robô e repetidas durante a execução.
II - Uma das desvantagens da programação por aprendizagem consiste na impossibilidade de executar o aprendizado com carga sendo transportada pelo efetuador do manipulador robótico.
III - Na programação por linguagem textual, o operador deve usar uma linguagem de programação, geralmente com termos de língua inglesa, visando codificar instruções no programa.
IV - A programação mecânica consiste em usar chaves fim-de-curso, contatores elétricos, batentes e cames para estabelecer os pontos extremos de cada junta, sendo recomendada para tipos de programação mais sofisticados.
Está correto apenas o que se afirma em
Provas
Caderno Container