Considere a seguinte aproximação de um sistema que controla a posição de um dispositivo de inércia pura através de um controlador PD:
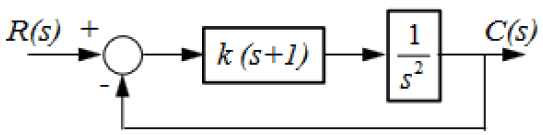
O esboço do Lugar Geométrico das Raízes (LGR), do referido sistema, pode ser representado como
Considere a seguinte aproximação de um sistema que controla a posição de um dispositivo de inércia pura através de um controlador PD:
O esboço do Lugar Geométrico das Raízes (LGR), do referido sistema, pode ser representado como