A dinâmica de um satélite, em relação a um dos seus eixos de rotação, pode ser aproximada pela função de transferência (G), relacionando a posição angular (!$ \circleddash !$) e o torque de posicionamento (T).
!$ G(s)={\large{\circleddash (s) \over T(s)}}={\large{1 \over s^2}} !$
Considere a malha de controle abaixo.
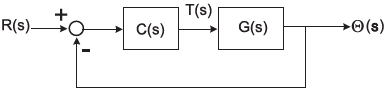
Um regulador C(s) que estabiliza o posicionamento do satélite é do tipo: